联系我们
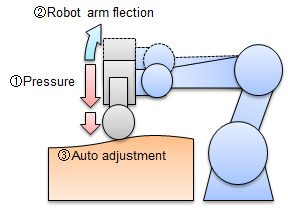
1991年开发的机器人包边系统是传统的压边, 与桌面下摆的方法相比,它是一个划时代的系统,具有诸多优点。 2013年更新了原有机制。滚轮的加压方法从油压控制变为伺服电动机控制的同时, 搭载包边加工专用控制机能,启用伺服加圧式机器人包边系统。